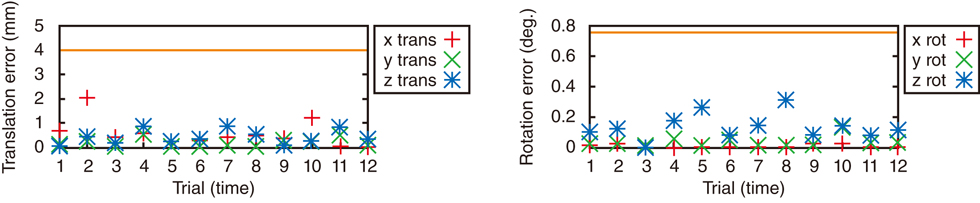
Fig.9-4 Robot vision positioning errors
We confirmed that the robot vision-based system satisfies the positioning accuracy requirements for the manipulator (less than 4 mm in translation, 0.76° in rotation, as indicated by the orange lines in the graphs).
Go back by your web browser, or click the right button.« Close