Protective measures could be taken rapidly to reduce radiation exposure to workers by deploying robots in place of humans to collect information on radioactivity, terrain, structural details, and environmental conditions at a nuclear emergency site or at a nuclear facility dismantlement site.
During the criticality accident in Tokai-mura in September 1999, a relatively long time was needed to obtain information about the radioactivity and other accident site conditions. This, in turn, resulted in a delay in implementing measures for accident management. To collect information at an accident site, humans may have to ascend or descend stairs, open doors, traverse obstacles, etc. Survey information in the form of images, radioactivity, contamination conditions, and so on, then must be gathered and transmitted to an accident management center.
The remote surveillance squads (RESQs) were therefore developed to confirm the occurrence of an emergency and to collect information relevant to the emergency (Fig. 1-14). RESQ-A is a portable vehicle for initial information collection that can be carried to the site by hand. Following its use, RESQ-B can be deployed. This robot is capable of opening doors and moving up or down stairs. RESQ-C is capable of performing light duty tasks, such as taking samples and cutting loose (detaching) components. RESQ-B and -C are tracked vehicles and are equipped with an automatic self-propelled drive systems that can function on slopes up to 40 degrees. Each has obstacle sensors and a gravity-sensing, balancing mechanism. A set of several sequence control packages with a menu selection window is available to accommodate effective computer control of material sampling motions at an accident site.
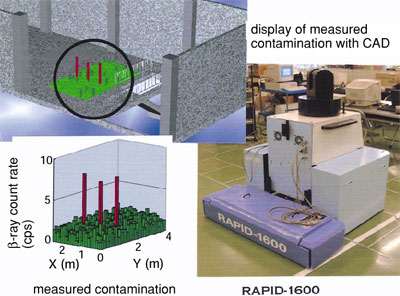
When dismantling nuclear installations, it is necessary to know contamination distributions on building surfaces in advance. RAPID-1600 has been developed to measure low-level contamination efficiently on building surfaces. RAPID-1600 measures radioactivity while traveling a predetermined route (Fig. 1-15). It has a double-layer radiation detector, recently developed, that provides beta-ray measurements by subtracting gamma-ray measurements from beta- plus gamma-ray measurements. This excludes gamma-ray noise arising from other sources. The lower layer of the detector counts gamma-rays and upper layer counts beta- plus gamma-rays. A position measurement system with digital markers also has been developed and included to identify contaminated areas precisely. The acquired measurements are analyzed at a remote station by receiving data using a wireless system. |