原子力施設で予期しない事態が発生した時や原子力施設の解体時に、必要な現場情報の収集や放射能の測定を、人に代わりロボットができれば、無駄な被爆量を減らし、迅速に適切な対応が可能になります。
平成11年9月に東海村で起こった臨界事故では、放射能や事故現場の情報の把握に時間がかかり、対応が遅れる原因になりました。事故現場の情報を収集するためには、階段を昇降したり、ドアを開閉したり、障害物を乗り越えて現場まで到達し、現場の映像、放射線量、汚染量など、多くの情報を集め、それらを離れた場所まで送ることが必要になります。そこで、異常事態発生の確認から情報収集が可能な事故時情報収集用ロボット隊RESQ-A, B, Cを開発しました(図1-14)。人がいち早く持ち運び、早期に情報を収集できるように軽量化したRESQ-A、その後直接現場に移動し、階段の昇降やドアを開閉するなど多様に行動できるRESQ-B、現場の状況に応じて試料の採取や機器の切断等の軽作業ができるRESQ-Cです。クローラ機構による斜度40度までの階段走行もできるように、障害物の検知と重心の移動を組み合わせた自動走行の制御方式を開発し、RESQ-B, Cに装備しました。また、現場での試料採取等の必要作業を効率化するため、メニュー別自動制御を考案し、附属マニピュレータに搭載しました。
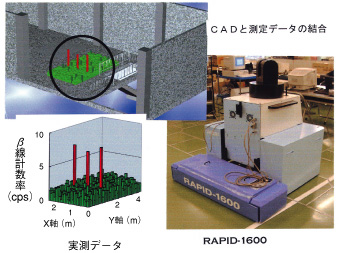
原子力施設を解体する場合には、予め建屋表面の放射能汚染の有無、汚染分布を把握することが必要です。これを素早く測定できるように建屋表面低レベル放射能測定ロボットRAPID-1600を開発しました。このロボットは予め測定した経路に従って自走し、放射能を自動測定します(図1-15)。外部線源による影響を排除して、より低いレベルまで放射能汚染を検出できるように、β+γ線からγ線を差し引いてβ線のみを選別する二層方式検出器を新たに開発するとともに、汚染箇所を精度よく決定するために床置型デジタル標識を用いた自己位置同定方式も同時に開発し、それぞれロボットに搭載しました。無線で受信した離れた所で測定結果を分析することができます。 |