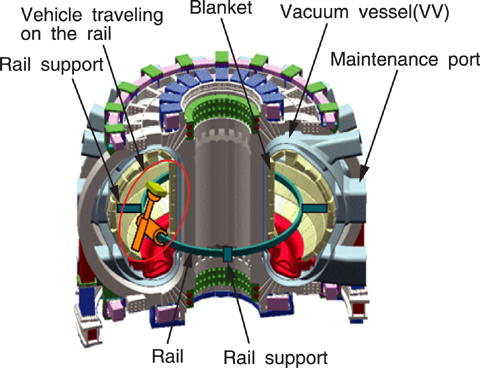
Fig.3-14 The ITER blanket module maintenance robot composed of a vehicle and a rail
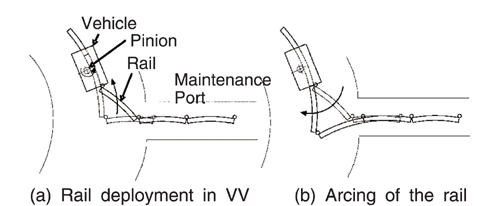
Fig.3-15 Installation of robot in VV (Rail deployment)
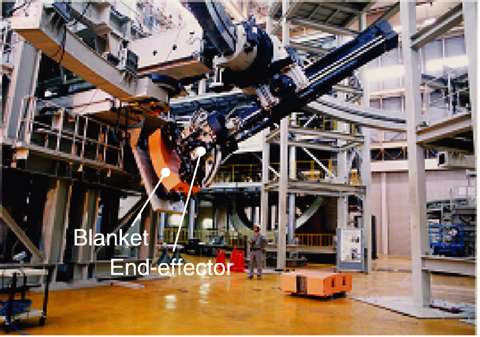
Fig.3-16 Blanket handling for high positioning accuracy
The inner lining (termed a "blanket") of the vacuum vessel (VV) of the International Thermonuclear Experimental Reactor (ITER) will be activated by 14 MeV neutrons generated by fusion reactions. Maintenance of the blanket in the VV thus is carried out under high gamma ray radiation conditions (~0.5 kGy/h). All interventions inside the VV therefore must be performed remotely. The principal features of this maintenance robot are as follows:
- The vehicle travels on a rail and has telescopic arms that can extend up to 6m. The rail is supported every 90° around the annular vessel, which provides sufficient stiffness (Fig.3-14).
- The rail is deployed by the vehicle which will be used for traveling along the rail (Fig.3-15). The rail therefore can be composed of simple structures that are not sensitive to radiation.
We have demonstrated rail deployment into the VV and the basic capabilities needed for blanket handling with a high degree of positioning accuracy.
The most critical issue of sensor-based control of positioning is designing a measurement scheme to compensate for the relative error between the location of the mechanism that grips the blanket and the target position for installing the blanket, thereby minimizing assembly error. A contact method using a force sensor that is uninfluenced by assembly error is employed for positioning. However, a technical problem of measuring via contact sensors is to allow for sensing time so as to be able to measure along each of the six degrees of freedom, rotation about three axes and linear movement along three coordinates. To solve this problem, we invented a new control scheme which initially determines the degree of each rotation. This initial measurement scheme limits the number of possible degrees of freedom to the three linear coordinates. The proposal was tested using a full-scale robot in order to confirm the feasibility of the new control scheme (Fig.3-16). The new control scheme resulted in a positioning accuracy of less than 3mm, within the positioning requirement of 5mm. Sensing time was reduced as well.
In conclusion, we found that the new proposal for improving the control scheme is appropriate for reducing sensing time and achieving the required positioning accuracy. Based on these results, we will proceed toward procuring this remote maintenance robot in order to deliver an efficient, reliable remote handling system to ITER.

