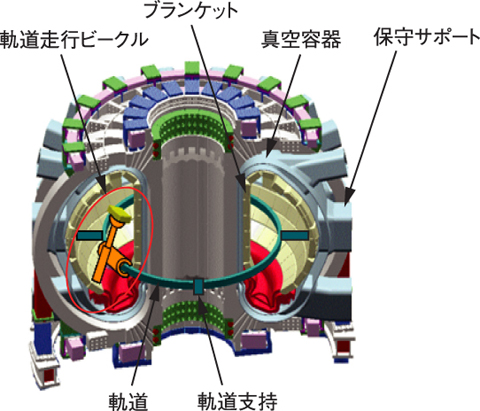
図3-14 ITER用保守ロボット(軌道走行ビークル,軌道より構成)
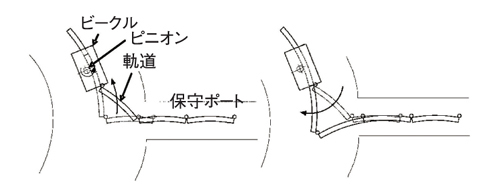
| (a)ビークルによる軌道の送り出し | (b)軌道の円弧化 |
図3-15 ロボットの真空容器内への移動(軌道の展開)

図3-16 ブランケットの高精度ハンドリング
ITERのブランケットは、核融合反応によって発生する14MeV中性子によって放射化(遠隔保守ロボットの設計に与えられた環境条件=約0.5kGy/hr)されるため、その保守はロボットを用いて遠隔操作で行う必要があります。ITER保守ロボットは、軌道上を走行するビークル(最大6mの伸縮可能なマニピュレータを搭載した台車)と軌道の90°ごとの4点支持の組合せにより、機動性と剛性が高いことが特徴です(図3-14)。軌道(ビークルが走行するレール)はブランケットの交換保守時には強固に固定されたリング状の構造体ですが、保守の最初の段階で軌道を保守ポートからドーナツ型の真空容器内に挿入し、内部で360°に展開する必要があり、軌道の構造信頼性を確保するため軌道には駆動源を持たない多関節軌道を採用しています。この多関節軌道をドーナツ型真空容器内へ展開するには、ビークル本体の走行機構を利用し、軌道の送り出し動作と円弧化動作を繰り返し行うことによって、軌道内には何の駆動源も必要とせずに軌道を真空容器内に展開することを可能としています(図3-15)。
これまでに、多関節軌道の真空容器内への展開方法やブランケットの高精度ハンドリングのための位置決め法に関わる基本性能を実証してきました。これらの結果に基づき、今回、ブランケットの位置決め時間を大幅に短縮させる位置決め制御性の改善を行いました。
保守ロボットにはある程度の組立誤差が存在します。この組立誤差を持ったロボットを正確な位置に位置決めするためには、エンドエフェクタ(遠隔で作業を行う手の部分)と目標位置との相対的な位置関係を正確に計測する必要があります。このため、組立誤差の影響を受けない計測法として力センサを使用する接触法を使用します。しかし、接触法では位置決めに必要な6自由度(回転3自由度,並進3自由度)を1自由度ごとに修正する必要があるため位置決めに時間がかかるという問題がありました。この問題を解決するため、今回、機構解析を行って位置決め時間を約1/2にする位置決め方法を考案しました。この方法は、回転3自由度を並進3自由度の修正前に修正するもので、先に回転3自由度を決めることによって回転自由度とは独立に並進自由度を扱うことができます。この方法を実規模装置に適用した結果、高精度ハンドリングのための位置決め性能を損なうことなく、要求精度5mmを満足する3mm以下の位置決め精度を再現性良く実現しました(図3-16)。
以上の研究成果により、ブランケットの位置決め制御性を大きく改善しうる見通しが得られました。このロボットは我が国が製作し、ITER への納入に責任を持っており、今回の成果をもとに、製作仕様の確定を進めていきます。

