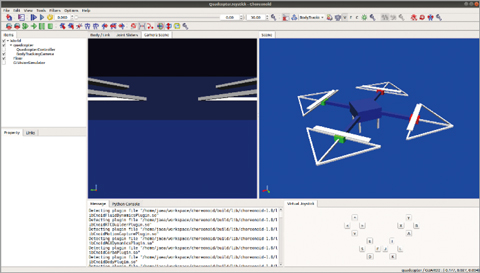
Fig.1-25 Example screen of a multi-copter simulation
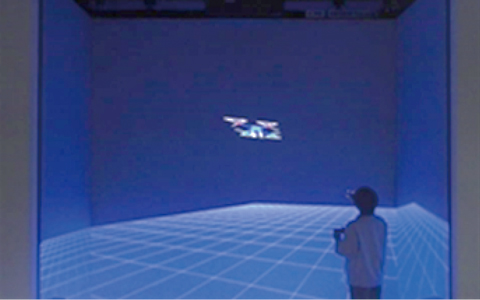
Fig.1-26 Virtual operator proficiency training
Due to the high radiation doses present since the accident at the TEPCO’s Fukushima Daiichi NPS (1F), radiation and physical survey tasks have been executed with remotely operated robots. However, maneuvering these remotely operated robots and executing the tasks safely are difficult due to unexpected environmental conditions in the reactor building. As such, specialized robots must be developed and operators must be trained. A robot simulator to support the design of remotely operated robots and operator proficiency training is thus under development.
Recently, a multi-copter was used to perform a radiation survey in the reactor building. Maneuvering a multi-copter in this indoor environment is difficult, as its behavior is affected by the local fluid dynamic interactions with nearby structures. An operator proficiency training for maneuvering the multi-copter is also required to copy with such situation. A simulator used to calculate the physical behavior of a multi-copter and a 3D real-size projection system for multi-copter operation training is thus under development.
The simulator determines the behavior of the flying multi-copter by calculating the effect of buoyancy and fluid resistance on the body of the multi-copter, as well as the Coanda and ground effects. The Coanda effect is a phenomenon in which a fluid jet is attracted to the surface of a nearby object such a wall or ceiling, whereas the ground effect is a phenomenon in which lift increases near the ground. These effects are important because they make maneuvering the multi-copter difficult. We implemented these effects by introducing a simple calculation model.
A full-scale simulated world projection system in real-time was also designed to provide a realistic training experience to an operator. This system was implemented utilizing the commercial application EasyVR to project the simulated world to a cave-type virtual reality screen and the GL-DLL commercial application Fusion to transfer the simulator’s OpenGL (Open Graphics Library) rendering signals to EasyVR. An example view of a multi-copter simulation is shown in Fig.1-25, and an example virtual operator proficiency training is shown in Fig.1-26. Using the simulator and projection system allowed the behavior of a multi-copter in an indoor environment to be calculated in real-time, and projecting the results in 3D allowed for better operator proficiency training.
Future work will focus on extending the operator proficiency training to other required functions in contribution to the decommissioning of 1F.
The presented development is a part of the result of “Development of a Robot Simulator for Mockup Plants”, supported by Fukushima Prefecture. This research was commissioned by FSK Co., Ltd. in 2017.

