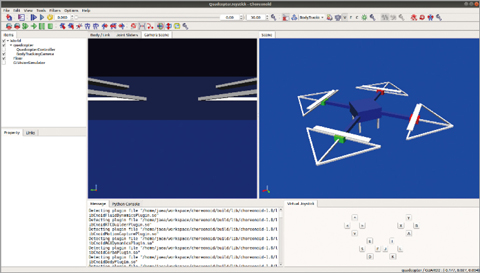
図1-25 ドローン飛行シミュレーションの実行画面例
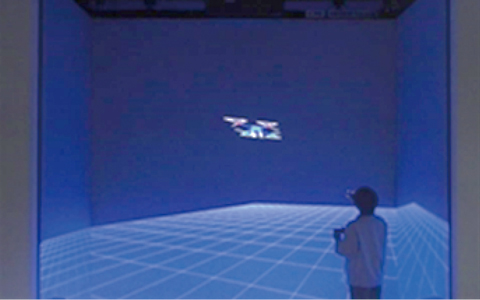
図1-26 目視による仮想操縦訓練の例
東京電力福島第一原子力発電所(1F)での事故後、原子炉建屋内が高放射線環境となりました。作業員の立入りが難しいそのような環境では、遠隔操作ロボットを利用して調査や作業等のタスクが行われています。事故後の原子炉建屋内は状況が明らかでない場所も多く、遠隔操作ロボットによる安全なタスクの遂行は容易ではありません。そのため、タスクに特化した高性能ロボットの速やかな開発とロボットを自在に操縦する技能を持つオペレータの訓練を行うことが必要です。私たちは、それらを支援することを目的としたロボットシミュレータ(以下、シミュレータ)の開発に取り組んでいます。
近年、ドローン技術開発や応用が盛んに行われており、原子炉建屋内の線量調査にもドローンが試験的に利用されました。原子炉建屋内のような屋内環境でドローンを飛行させると、プロペラの回転によって生じる空気の噴流が周囲の構造物と相互作用することで流体力が飛行状態に影響するため、操縦が難しくなります。そのため、ドローンを用いて安全にタスクを行う場合にも、自在に操縦するための技能を持つオペレータの訓練を行う必要があります。そこで本研究では、シミュレータを用いたドローンの操縦訓練に必要なドローンの飛行挙動を模擬する機能の開発と仮想空間にそのシミュレーションの様子を実物大投影して、目視によるドローンの操縦訓練を行うシステムの構築を行いました。
ドローンの飛行挙動模擬機能は、飛行中のドローンに作用する空気の流体力を総合的に計算し、飛行状態を再現するものです。特に、屋内環境において発生する特徴的な流体力による外乱の代表的な効果である壁や天井等の近傍を飛行する際にその表面に引き寄せられる現象(コアンダ効果)及び地面近傍で揚力が増加し、姿勢が乱される現象(地面効果)が重要であり、私たちはこれらを簡易的な計算モデルによって実装しました。
次にシミュレータを用いてオペレータに実物を用いた訓練と同様な体験を提供するために、シミュレータ上のシミュレーションの様子を実時間で三次元実物大に投影するシステムを構築しました。具体的には、シミュレータ上で三次元描画に用いられるOpenGL(Open Graphics Library)の描画信号を商用GL-DLLソフトウェアFusionにより複製し、商用バーチャルリアリティ描画ソフトウェアEasyVRに転送して、実物大の三次元映像として投影するという構成で実装しました。図1-25はドローン飛行シミュレーションの実行画面例、図1-26はバーチャルリアリティを用いた目視によるドローンの操縦訓練の例を示しています。
これらの二つの技術を組み合わせることにより、屋内環境を飛行した際の外乱の影響を受けているドローンの飛行挙動を実時間で計算し、そのシミュレーションの様子を実時間で三次元実物大に投影して目視によるドローンの操縦訓練が可能となりました。
今後も私たちは、遠隔操作ロボット開発やオペレータのロボット操縦技能訓練を支援するシミュレータ開発を通じて、1F廃止措置の推進に寄与していきます。
本研究におけるドローンの挙動模擬機能の開発は、福島県からの受託研究「模擬プラント用ロボットシミュレータ開発業務」の一環として、平成29年度に原子力機構が株式会社FSKより委託を受け実施しました。

