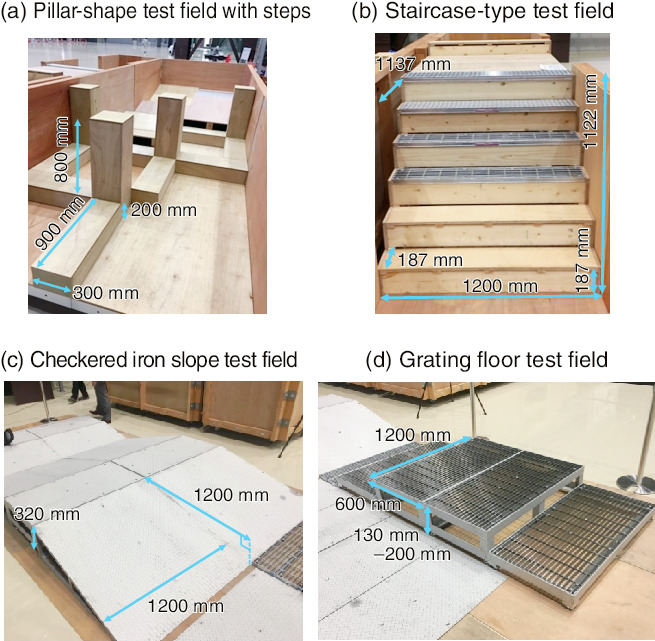
Fig.1-22 Developed test fields

Fig.1-23 Verification of the remotely operated robot by test runs
Inside the reactor buildings at the TEPCO’s Fukushima Daiichi NPS (1F), remotely operated technologies including robots are being deployed for decommissioning tasks. However, some troubles with robot operations have occurred on account of the hazardous working environment. Therefore, it is crucial to execute prior performance evaluation of the robots and operator-proficiency training according to the mission and task. As a pioneering work by the National Institute of Standards and Technology (NIST), a series of standard test methods for response robots (STM) have been developed to measure robot mobility and operability in hazardous environments and to facilitate quantitative evaluation. It is reasonable to introduce a similar STM concept to remote operations for smooth decommissiong of 1F. Most STMs simulate ground surfaces such as rubble utilizing wood; however three-dimensional structures and metal properties that existed in the reactor building have not been prepared. The aim of this research is to develop test methods and test fields for decommissioning tasks that introduce the characteristics and properties of the working environment in the reactor building.
First, we reviewed video data related to robotic operation that is available from the TEPCO website and used a time-analysis approach to study the robot’s behavior. The results revealed that traveling, traveling over steps, angular adjustment of sub-crawler tracks, and stopping account for a large percentage of the robot’s time allocation. Also, classification and functional analysis of operational troubles demonstrated that the major concerns include structures interfering with the cable connected to the robot and difficulty in recognizing the surrounding environment and the status of the robot.
Based on these results, we designed and developed a test field with three mutually perpendicular elements to reproduce cable interference and low surroundings recognition (Fig.1-22(a)). By conducting tests with a remotely operated robot, this setup is confirmed to reproduce the effect by which the cable can become entwined around a pillar-shaped part (Fig.1-23(a)). This pillar also became an obstacle, generating a blind spot in the operator’s view (Fig.1-23(b)). When the robot moves in the reactor building, travel over the steps made of checkered iron and a grating is required. Therefore, we developed a staircase-type test field capable of changing the properties of the thread (Fig.1-22(b)). We also developed checkered-iron slopes and grating floors (Figs.1-22(c) and (d)). We could reproduce situations causing major trouble for remote operation and simulate the properties of the working environment. Developed fields have a size compatible with STM, as developed by NIST.
In a future study, we will design and develop a test field modeling the part accessible to the inside of the primary containment vessel (PCV) and arrange various test environments based on a combination of the test fields developed for promoting robot development and operator training to contribute to the decommissioning of 1F.

