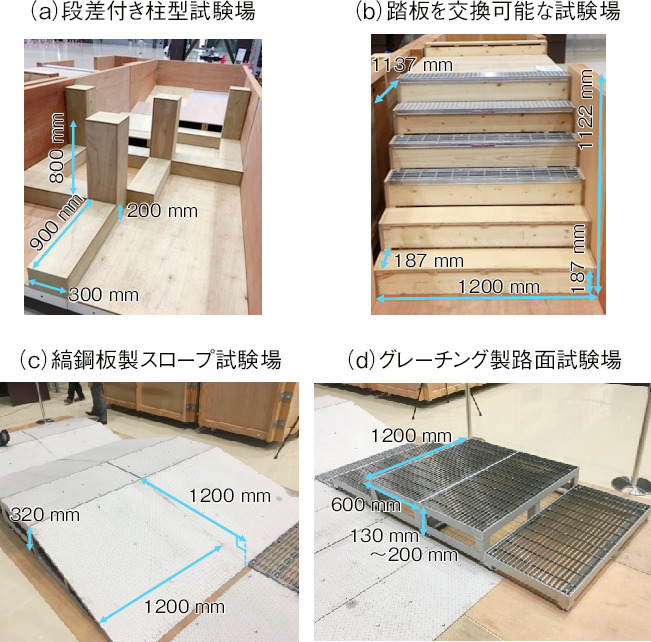
図1-22 開発した試験場

図1-23 遠隔操作ロボットを用いた試験走行による検証
東京電力福島第一原子力発電所の原子炉建屋では、廃止措置にロボット等の遠隔機器が用いられています。しかし、複雑な作業環境のために、一部でトラブルが発生しています。このため、ミッションに応じたロボット性能試験、操作訓練を事前に実施することが重要です。災害対応ロボット開発分野では、2001年同時多発テロを契機に標準試験法という性能評価規格の整備が進められています。廃止措置の遠隔作業においても同様の考えを取り込むことは、効果的な作業推進に重要であります。上述の標準試験法ではがれき等の地表形状を模擬した木製の試験場が基本であり、建屋内で見られる立体的な物体や金属等の環境について整備されていません。そこで、本課題では廃止措置の作業環境の性質を模擬したロボット等の試験法の開発を目的としています。
まず、東京電力より公開されたロボットの作業記録を抽出し、時間に基づいて作業分析を行いました。これにより、走行、階段・段差等の走行、サブクローラ角度調整、停止等の項目の占める割合が大きいことが分かりました。また、作業中のトラブルを分類するとともに、要因分析を行った結果、ロボットに接続されたケーブルと構造物の干渉や作業環境・ロボット状態認識の難しさ等が要因であることも見いだしました。
これらの知見をもとに、ケーブル干渉や環境視認性の低下等の課題となった状況を再現するための3本の柱状物が相互接続された形の試験場を開発しました(図1-22(a))。これにより、ケーブルが構造物に巻き付く現象の再現を確認しました(図1-23(a))。また、柱状部分により環境視認性が低下することも確認しました(図1-23(b))。原子炉建屋内を移動する際には縞鋼板、グレーチング等の階段・段差等の不整地走行が必要なことから、踏面を交換可能な階段型試験場を開発しました(図1-22(b))。また、建屋内に多く見受けられる縞鋼板製スロープやグレーチング製路面の試験場を開発しました(図1-22(c)、(d))。これらにより、事故後の遠隔作業において発生した主要な課題、環境を模擬する試験場を実現しました。これらは、前述の標準試験法との互換性を考慮にいれてサイズ設計がされています。
今後は、格納容器内アクセス用試験場について、同様のアプローチで開発し、開発試験場の組合せにより多様な試験環境を設定可能にし、遠隔機器の開発促進やオペレーターの習熟度向上等の観点から廃止措置の推進に貢献していきます。

