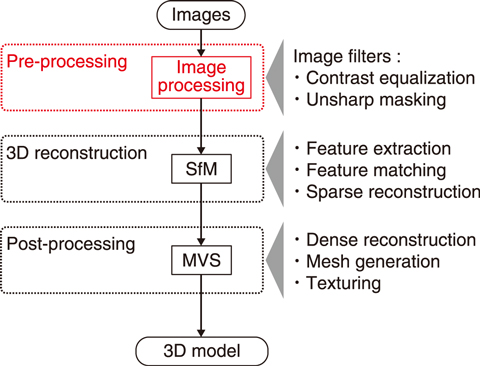
Fig.1-10 Processes required to generate a 3D model from images
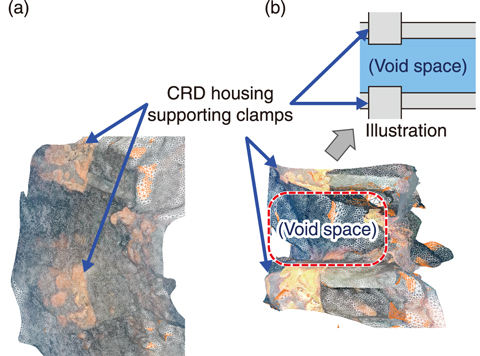
Fig.1-11 Results of 3D reconstruction
As a part of the decommissioning of the TEPCO’s Fukushima Daiichi NPS (1F), remotely operated robots have been used for various tasks to reduce the radioactive exposure to workers. In such tasks, it can be difficult to be aware of the robot’s working environment, as the operators handling the robots do so by monitoring the images transmitted from cameras mounted on the robots. Due to the operator’s resulting lack of spatial awareness, issues such as cable trouble and robot roll-over accidents have occurred. Thus, it is important to provide operators with the necessary information to allow them to perform the tasks safely and efficiently. In this study, a 3D reconstruction method was developed using images obtained by the robot in the working environment to support the remote operation.
To verify the suitability of the 3D reconstruction method in the working environment at the decommissioning site, images obtained by the robot inside the primary containment vessel (PCV) were analyzed. The images were extracted from a video of the survey task available on the TEPCO website. However, the obtained images have low contrast and are blurry, making the extraction of features required for 3D reconstruction difficult. The required image features include feature key points such as the corners and edges of structures. If these image features are insufficiently extracted, the conventional 3D reconstruction method cannot generate an accurate 3D model.
To improve the feature extraction, a pre-processing image processing step was applied using two contrast equalization and unsharp masking image filters. Here, the extracted number of image features was improved by adjusting intensity thresholds and a scaling constant as the parameters of the image filters. Using these pre-processed images, 3D reconstruction was performed by applying Structure from Motion (SfM). SfM computation generally extracts the image features from the images and finds correspondence among the images by a feature-matching calculation. By triangulation, each matched feature is registered as a point in a 3D space; via sparse reconstruction, these points compose a 3D point cloud. However, since the obtained 3D point cloud has a low density, it is still difficult to be aware of all of the surrounding structures. Thus, visibility improvement is required to be aware of the structures in the working environment. To improve visibility, Multi-View Stereo (MVS) was applied as post-processing. The MVS reconstruction produced a dense reconstruction from the 3D point cloud obtained from SfM computation; a mesh surface was then generated based on the dense reconstruction. Moreover, textures were added to the generated mesh surfaces to obtain a final 3D model. A summary of these processes employed to generate a 3D model is shown in the flowchart in Fig.1-10.
To evaluate the correctness of the introduced pre-processing, 3D models based on the pre-processed and original images were compared. As shown in Fig.1-11(a), the 3D model reconstructed from the original images had a few bumps and dips on the surface but was formed a smooth, curved surface. In contrast, the 3D model reconstructed from the pre-processed images had a void space between the supporting clamps of the control rod drive (CRD) housing and was had more surface variations (Fig.1-11(b)). This indicates that applying the developed image pre-processing method helps generate a more-accurate 3D model to support the remote operation for the decommissioning.
Future efforts will include the development of a method for displaying the generated 3D model to the robot operator in real-time for safe decommissioning of the 1F.
(Toshihide Hanari)

