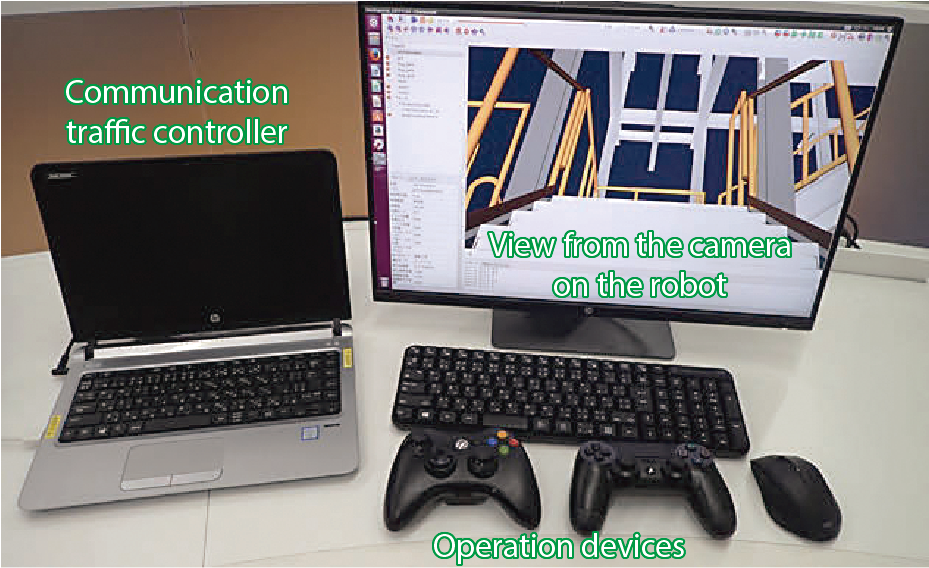
Fig.1-21 Developed robot simulator

Fig.1-22 Examples of the simulation model and simulated effect
After the accident at the TEPCO’s Fukushima Daiichi NPS (1F), areas within 1F have high radiation-dose rates, so remotely operated robots need to be deployed there for physical and radiation surveys. It is difficult to remotely maneuver the robots inside reactor buildings due to natural obstacles that include staircases and obstacles created by debris from the accident. Remote robot operation is complicated by frequent difficulties with signal transmission between the operator site and the robots. Therefore, it is necessary to develop robots for specific tasks and to train skilled robot operators. To meet these needs, we are developing a robot-simulator system to support performance evaluation of remotely operated robots and to improve robot-operator skills (Fig.1-21 and Fig.1-22(a)).
As the basis of the robot simulator, we used a Choreonoid that was developed by the National Institute of Advanced Industrial Science and Technology (AIST). Additional functions can be designed and implemented on the Choreonoid as plug-ins. Therefore, we developed required functions and installed a 3D digital model inside the 1F reactor building to realistically simulate remotely operated robot-operational cases in the decommissioning process.
We developed a plug-in function for simulating the submerged behavior of underwater remotely operated vehicles (ROVs). The plug-in calculates the effects of buoyancy, hydrodynamic-lifting force, and fluid resistance upon the ROV’s body in response to motion commands.
A plug-in function for camera-view-disturbance effects was also developed. We designed these functions to add the effects of magnification, distortion, noise, and view-blocking obstacles. Distortion effects occur in the underwater environment due to refraction. Fisheye distortion is a typical example of image distortion. Noise on the image is simulated to present an unclear-visual-recognition situation to the operators (Fig.1-22(b)).
Another function that we developed simulates the effects of signal- and data-transmission trouble that occurred during past missions of remotely operated robots at 1F. This function is implemented by installing a computer called the communication-traffic controller, between the computer that runs the robot simulator and the computer used to operate the simulated robot. The communication-traffic controller manages the communication states and can vary bandwidth limitations, communication delay, packet loss, and jitter effect both upstream and downstream. The developed simulation functions are implemented in the robot simulator and a 3D digital model is installed inside the 1F reactor building. The user can experience realistic remote operations by the robot (Fig.1-21).
We will continue to develop and implement the required functions to the robot simulator to promote robot development and operator training to contribute to the decommissioning of 1F.

