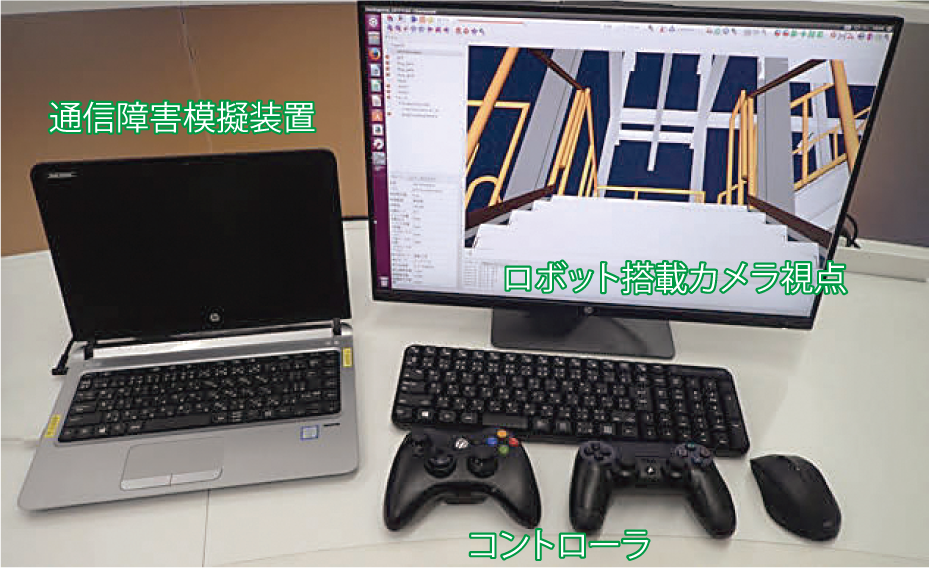
図1-21 開発したロボットシミュレータ

図1-22 シミュレーションによる再現の例と模擬効果の例
東京電力福島第一原子力発電所(1F)の廃止措置では、人が作業現場に近づくことが難しいため、遠隔技術の導入が不可欠です。作業現場は階段やがれき、水没領域などの環境があり、作業内容も調査や除染等と多様です。必要となる機器の仕様や性能は多岐にわたるとともに、これらの機器を有効に活用するためには高度な操作技術が必要となり、操作者を訓練していく環境の整備が重要です。しかし、ロボット設計開発時における試行錯誤や操作訓練時に必要なフィールドの構築、ロボットの破損等の負担は少なくありません。そこで本研究では、計算機上で仮想的な作業環境モデル及びロボットモデルを用いて、廃止措置に係るロボット開発及び操作訓練の効率化に寄与するために、ロボットシミュレータと呼ぶ技術の開発を行っています(図1-21、図1-22(a))。
開発中のロボットシミュレータは、産業技術総合研究所が開発しているロボット開発用統合ソフトウェアChoreonoid(コレオノイド)をベースとしていて、私たちは1F内三次元データを取り込んで、廃止措置のロボットによる遠隔作業に必要となる模擬機能を追加し、ロボット開発や遠隔操作習熟に役立てるための研究開発をしています。
廃止措置では原子炉建屋内調査や格納容器内調査作業の一部は水没領域で実施されていて、水中環境での遠隔機器・ロボットの動作検証や操縦訓練を行うことは大変重要です。そのため、私たちはロボットシミュレータの機能の一つとして、水中ロボット動作模擬機能の開発を行いました。シミュレータに読み込んだロボットモデルの動作を模擬するために、ロボットモデルのボディに対する表面力や浮力、機器のモデルを移動させることにより発生する抵抗力、揚力等を計算することができます。
また、これまでの廃止措置の作業において、遠隔機器・ロボットに搭載されている操縦用カメラのレンズへの塵や汚れ等の付着や、ノイズの影響により映像上の視認性に影響を与える障害が発生しています。そこでカメラ視野に視覚的なノイズや障害物、レンズの歪み効果、透明度等を模擬的に提示する機能の開発を行いました(図1-22(b))。
さらに、廃止措置に用いられている遠隔操作ロボットは、信頼性の観点から有線ケーブルを介して双方向に制御信号やデータの通信を行うシステムによって操縦されています。このような有線通信の場合でも通信状態に関わるトラブルが報告されており、通信状態変化を含んだ状況で機器の操縦訓練を行うことが重要です。このため、私たちはシミュレータ内の通信伝達遅延、通信データの欠損、通信速度の低下等の状態を設定することで通信状態を変化させる通信障害模擬機能を開発しました。これらの開発した模擬機能はシミュレータに実装され、シミュレータに取り込んだロボットモデルや1Fの原子炉建屋内三次元環境モデルと連携することで、遠隔操作ロボットによる作業を体験することができます(図1-21)。
現在も廃止措置の進行とともに必要となってくる模擬機能の開発や作業環境データの整備等を進めており、今後もロボットの開発促進やオペレータの操作習熟の観点から廃止措置の推進に寄与していきます。

