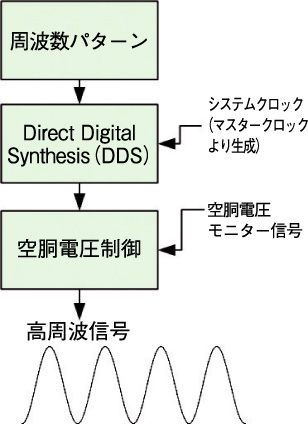
図12-11 デジタルLLRF制御システムの中心部分の概略
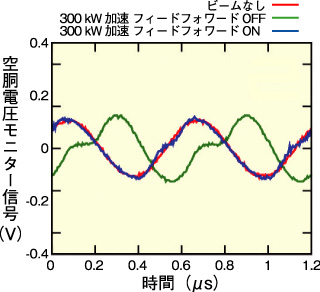
図12-12 フィードフォワード有無での波形の比較
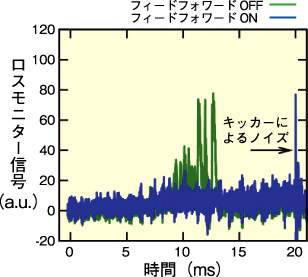
図12-13 フィードフォワード有無によるアーク部のビームロスモニターの比較
J-PARC Rapid Cycling Synchrotron(RCS)は25 Hzの繰り返しで陽子を 3 GeVまで加速し、物質・生命科学実験施設(MLF)及びメインリング(MR)に供給します。目標ビームパワー1 MWに向け調整を進めており、25 Hz運転では300 kWのビームパワーを達成しています。大強度ビームを安定に加速するために、RCSでは金属磁性体コアを用いた高周波加速空胴(MA空胴)を採用し、従来のフェライト空胴では不可能な高い加速電場(20 kV/m)を実現しています。空胴の高周波電圧はデジタル低電力高周波制御(LLRF制御)システムにより精密に制御されます。デジタルLLRF制御では、加速器全体を統括するマスタークロックを基準に、Direct Digital Synthesis(DDS)技術を使い高周波信号を発生させます(図12-11)。DDSでは従来のアナログ回路より1000倍以上高い精度で周波数を制御できるため、ビーム制御の再現性を大幅に向上させることができました。その結果、取り出しビームのタイミングのばらつきを1.7 ns以内と、大強度陽子シンクロトロンとしては世界最高の性能を達成しました[1]。精密なビームタイミングはMRへの正確なビーム入射やMLFでの実験分解能の向上に役立っています。
MA空胴のもうひとつの特徴は周波数帯域が広帯域であることで、加速電圧波形の操作によりビームの形を制御することが可能となり、大強度ビームの空間電荷力を緩和できます。しかし、ビームが空胴を通過する際に発生するウェーク電圧も広帯域なものになるため、大強度ビームを加速すると電圧波形に歪みが生じることが問題でした。
私たちはこのウェーク電圧による電圧波形の歪みをなくすために、マルチハーモニックRFフィードフォワードシステムを開発しました。システムはすべてデジタル回路で構成され、ビーム電流モニター信号からウェーク電圧を打ち消すための信号を生成します。ゲインと位相のパターンにより、加速中の様々な条件の変化に対応します。私たちはパターンを最適に調整する手法を確立し ました[2]。その結果、電圧波形の歪みを大幅に減少させ(図12-12)、300 kWビーム加速時にわずかにあったビームロスを減少させることに成功しました(図12-13)。この成果は1 MWのビームパワー実現に向け大きな前進です。

