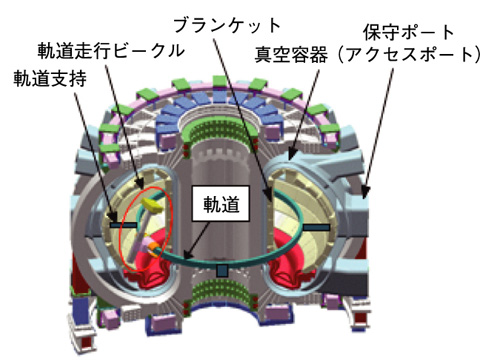
図3-5 ITER保守ロボット
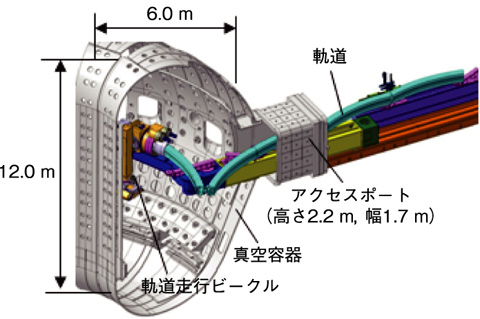
図3-6 保守ロボットを炉内に設置する場合の条件
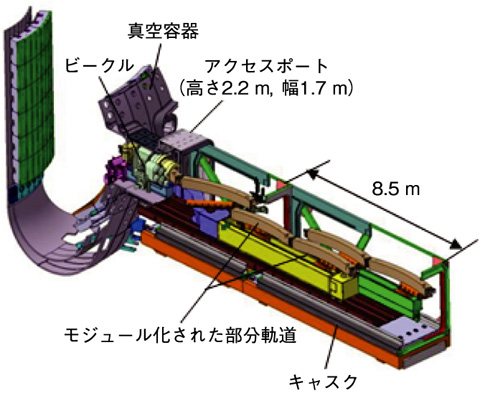
図3-7 保守ロボットを炉内に設置する装置
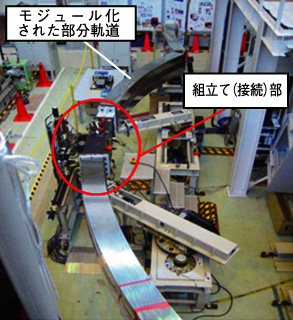
図3-8 モジュール化された部分軌道の組立て(接続)実証試験
ITERでは、核融合反応から生じる中性子によって構造材が放射化されるため、ブランケットなどの真空容器内機器の保守は遠隔装置によって行います。ITERにおいて、ブランケットは保守交換を容易にするために440個のモジュールに分割されていますが、個々のモジュールは大重量(4.5t)かつ大型(1.4m×1.0m×0.5m)であり、ブランケットを遠隔によって保守を行うロボット(保守ロボット)の開発はトカマク装置の維持・保守のために必須です。
この保守ロボットは、軌道上を走行するビークルと軌道の90度毎の4点支持の組合せにより、機動性と剛性が高いことが特徴です(図3-5)。これまでに、真空容器内 (炉内)での重量物の高精度ハンドリング技術を実証してきました。今後、更に開発を進め、保守ロボットを実現するために克服すべき重要な技術課題は、保守ロボットを炉内へ設置する技術を確立することです。
この炉内への設置技術に要求される条件は、(1)炉内の保守空間(高さ12.0m,幅6.0m)に比較し、狭隘なアクセスポート(高さ2.2m,幅1.7m)を通過して炉内に保守ロボットを設置すること、(2)保守ロボットはキャスク(長さ8.5m,幅2.5m,高さ3.0m)によって 自在に搬送できる大きさであることの二つです (図3-6)。これら二つの要求条件を満足するために、保守ロボットの主要な機構要素である軌道と軌道接続・展開装置をモジュール化し分離しました。こ のモジュール化によって狭隘なアクセスポートからの保守ロボットの挿入と、キャスクでの搬送が可能な軌道接続・展開機構の小型化を実現しました(図3-7)。
モジュール化による技術課題は、軌道上をマニピュレータが円滑に走行するために、モジュール化した部分軌道の組立て(接続)に0.1mm程度の高精度が要求される点です。一方、組立てを行うアクセスポート付近も放射線環境下であるため、位置測定のための精密なセンサ類を使用できず、ガイド構造による受動的な位置合わせによらざるを得ません。そこで、高精度の組立てを可能とする新たな軌道組立て機構を考案し、図3-8の軌道接続装置により0.1mmの高精度接続を可能としました。これにより、狭隘アクセスポートから保守ロボットを炉内に自動設置する組立て技術を確立し、保守ロボットの実機製作に向けて技術課題を解決しました。

