
図9-2 ITER遠隔保守ロボット試験機
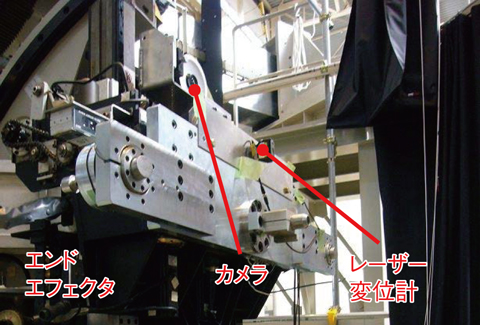
図9-3 ロボットビジョンに用いるカメラ
図9-4 ロボットビジョンによる位置決め時の誤差
核融合炉では、熱や放射線による真空容器の損傷を防ぐため、ブランケットと呼ばれる機器を真空容器内面に設置します。ITERではブランケットは440個のモジュールに分割されていて、最大重量は約4 tです。ブランケットは交換が必要ですが、交換時の真空容器内は250 Gy/hの放射線(γ線)環境であり、遠隔保守機器が不可欠です。私たちはこれまでブランケットを把持し交換するための遠隔保守ロボットを開発してきました。ロボットとして、軌道上を走行する大型マニピュレータを採用し、真空容器の全域へ到達できる設計です(図9-2)。ブランケットを把持するためには、マニピュレータの位置をブランケットに対して並進4 mm,回転0.76度以下の誤差で合わせる必要があります。また、ブランケット表面を傷つけないよう、位置決め方法は非接触でなければなりません。従来の方法であるレーザー変位計は放射線に弱い半導体を用いているため適用できません。そこで、撮像管式のアナログカメラが2 MGy程度の耐放射線性を持つことに着目し、カメラと画像処理による位置決め方法を開発、試験しました。これはロボットビジョンと呼ばれるロボットの制御方法です。
開発した方法では、マニピュレータの先端部であるエンドエフェクタにカメラを設置します(図9-3)。このカメラでブランケットを撮影し、撮影した画像を処理することでマニピュレータとブランケットの相対的な位置が計算できます。計算された位置に基づきマニピュレータを動作させることで位置決めをします。撮像管は解像度が走査線数500程度と低いため、画像が粗く、位置決め精度が低くなってしまうことが課題でした。この課題に対しては、カメラを2台用いて、それぞれのカメラの画像情報を組み合わせて計算することで精度の向上を図っています。
開発した方法によるマニピュレータ位置決めの誤差を評価するため、試験を実施しました。誤差はエンドエフェクタに設置したレーザー変位計を用いて計測しています(図9-3)。試験の結果、最大の誤差は並進について2.0 mm,回転について0.31度であり、位置決めの精度がブランケット把持のための精度を満たすことを確認しました(図9-4)。
このように、ロボットビジョンが放射線環境におけるマニピュレータの位置決め方法として適していることが分かりました。今後は、ロボットビジョンや力センサを組み合わせて、ブランケットに対する位置決めだけではなく、把持までを自動で行える制御方法を開発する予定です。


